




In this short video blog we compare a fixed threshold with the more versatile C-FAR algorithm.
 It is the art of the radar expert to get a clean image of the targets - in other words to differentiate target returns from clutter or noise.
It is the art of the radar expert to get a clean image of the targets - in other words to differentiate target returns from clutter or noise.
Two algorithms that can help are a fixed threshold and the C-FAR.
In this short video, we make a comparison of these two functionalities. They are visualized and controlled in FreeScopes. FreeScopes is SkyRadar's Radar Control Center for training and research applications.
The video illustrates the functional limits and the resulting risks of a fixed threshold. It easily eliminates targets with weak reflections. C-FAR provides much better results.
C-FAR stands for Constant False Alarm Rate.
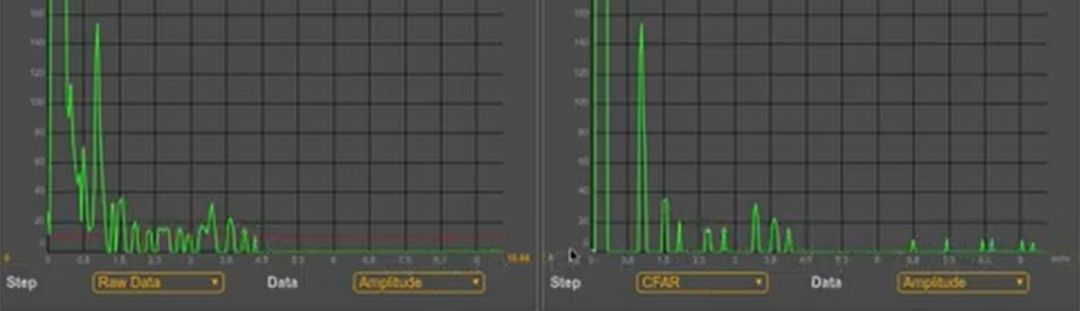
Figure: fixed threshold (left), C-FAR (right)
It is an adaptive thresholding technique to detect even weak targets against clutter.
In contrast to the static Threshold limiter, C-FAR dynamically adapts to the constellation of noise and targets at each specific point.
It uses a sliding window around a target, which calculates the mean value of neighboring reflections to determine the threshold for a specific cell under test (highlighted in green). Cells under test are called CUT.
The cell under test is surrounded by "guard cells" (red). The blue cells (including the red and the green ones) define the sliding window of observation.
There are various variants of algorithm for the detection of the false alarm rate. We used the perhaps most common version. It has the following parameters:
- alpha - defining the threshold for the probability of false alarm (pfa) and detection (pf)
- window - the size of the observation window to estimate the noise floor (noise power)
- guard cells - they are the cells around the CUT which we ignore because of side-lobes from the target.
You will see how playing around with these parameters will impact the image in the A-Scope. Enjoy the video.
Call us, if you are interested in purchasing any of our NextGen Radars that use C-FAR.







