




This article presents the Kalman filter in text and video. It is implemented in FreeScopes ATC II and works with live data, recorded data and simulation.
We can define the Kalman filter as an efficient algorithm for estimating the state of a system from noisy measurements. The Kalman filter can be used to estimate a system state, when it cannot directly be defined by combining measurements from different sources that may be subject to noise.
The idea is simple: if we have a dynamically moving target e.g., a missile or a plane, we will have some input to the system such as
- the engine of the moving target, which gives information about the expected acceleration and
- another input for example measurements which can be done with accelerometers.
Based on these inputs Kalman filters tries to predict the trajectory.
For moving target, the parameters of interest to be predicted can be
- location,
- speed or
- direction
in the presence of noisy environment.
You find more information about the Kalman in our blog
Here you can see in a step-by-step approach the tracking features included in FreeScopes ATC II culminating with the Kalman filter.
Before looking a real measurement in the video with the radar let's first look inside the Kalman filter block.
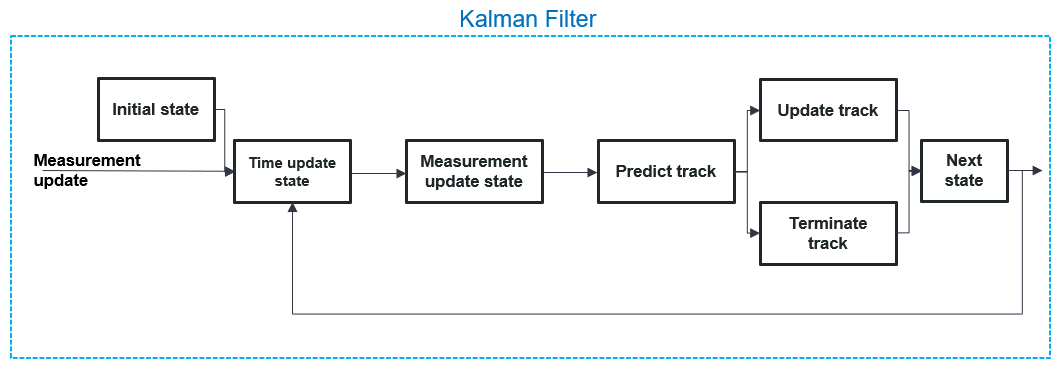
After the track is predicted, the output track will be updated using the nearest neighbour method between two consecutive tracks, to determine if the track is within distance gating boundaries.
If this track is estimated within the range gates the track for the output signal is updated.
If the predicted position cannot be associated with the nearest neighbour method, then the respective track is terminated.
And like this the filter iterates to the next state.
Let us now look at it in the video:
The Kalman filter is part of the ATC II, package. ATC II is a module within the FreeScopes Digital Signal Processing Environment for Radar Signals, which includes a whole set of advanced filters. ATC II also includes a set of "atomic" blocks like Zero Velocity filter, Clutter Map, or a Signal Delay Block, which enables students, trainees and researchers to compose their composite (advanced) filters.
Talk to us to discuss how to use FreeScopes and SkyRadar's training radars in your institute.







