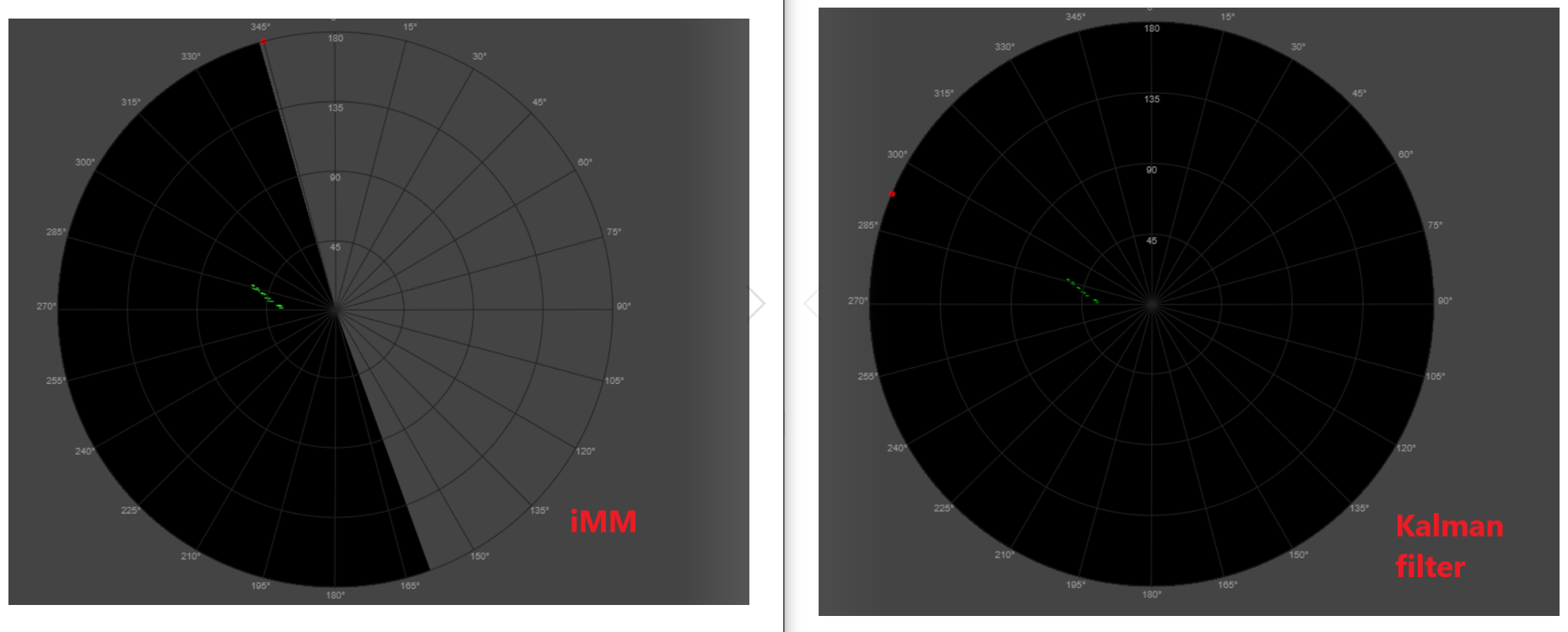
One of the most powerful statistical estimation techniques, which is widely applied in navigation, radar tracking, jamming defense, satellite orbit determination, autonomous driving, and many other fields is the Kalman filter. This digital filter provides a quite accurate estimation of the next state (position, movement, temperature, etc.) from any possible noisy input signal, in real time, which makes it very suitable for radar navigation and tracking purposes.
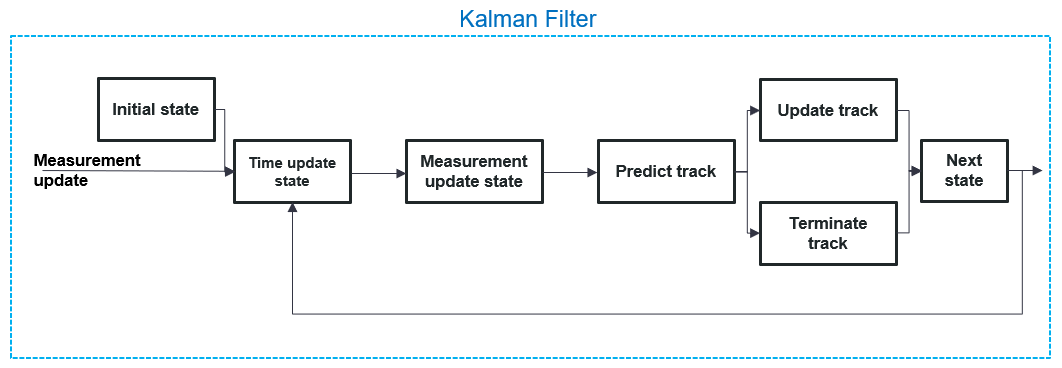
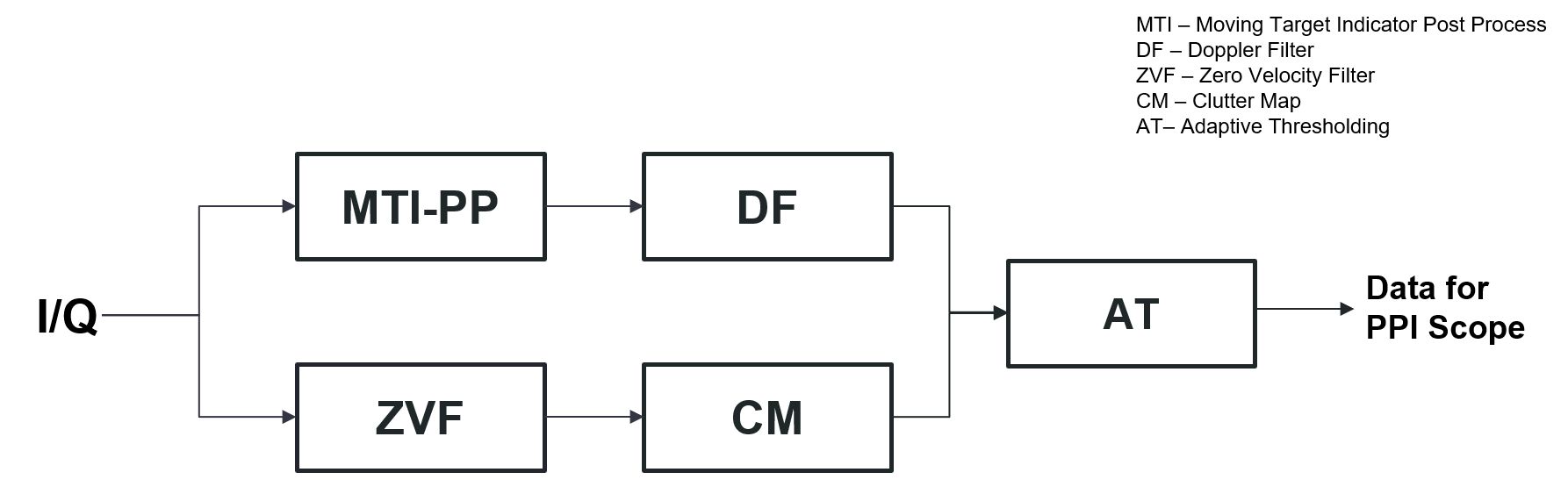
For the tracking feature in ATC II, we make use of the Kalman filter principle, to estimate the detected moving targets. In the following figure, the block diagram of the tracking feature is shown.
The tracking feature of ATC II consist of four steps:
- Signal detection – DET
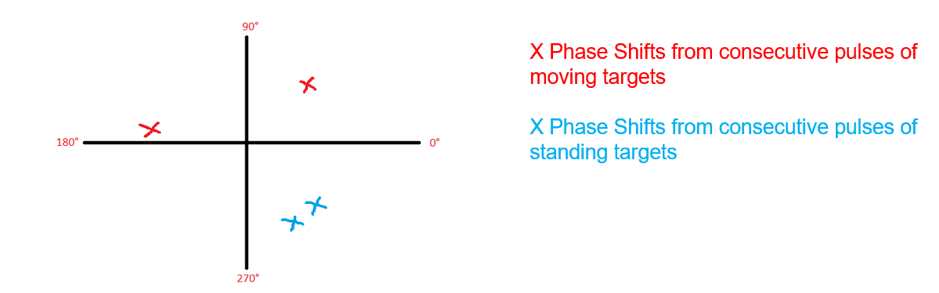
- Phase Shift detector – PH - DET
- Association – ASO
- Kalman filter – KF