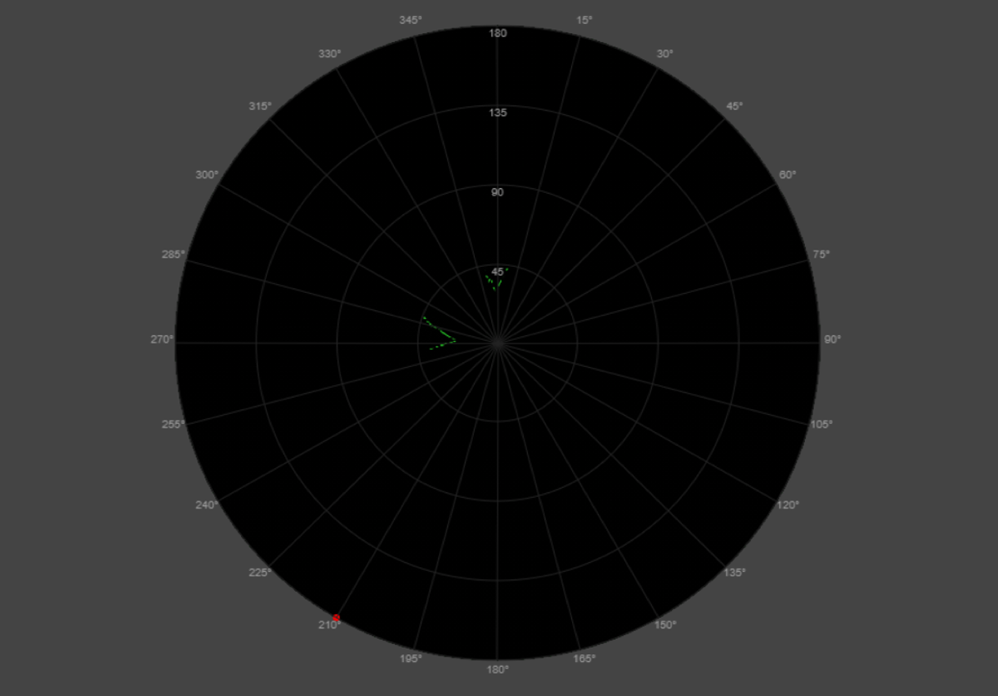
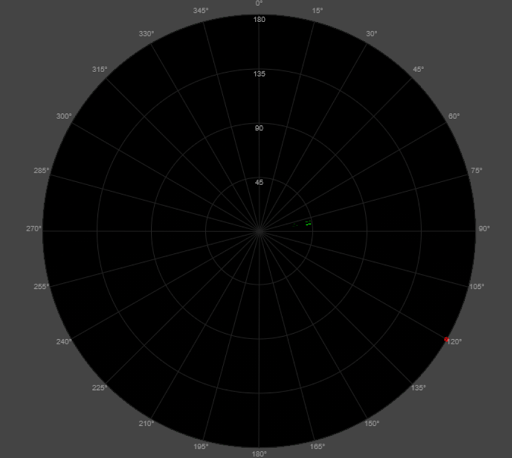
The Standing Person Recognition Algorithm – SPRA provides the capability to detect reflections coming from a standing target (person), which exists in a stationary environment.
Connected mobility, increased activities on the runways but also perimeter surveillance bring new challenges to close range radars.
The main idea of estimating the correct position and recognizing a standing person in different environments comes from the clutter map concept. Since a standing target is expected to be standing also after a whole radar sweep, the algorithm will store the environment information for a complete radar sweep and estimate the position of the standing person based on the stored background information. Thus, on the next radar sweep, simultaneously we will store the environment reflections, and estimate classified reflections of the motionless person.