




The rapid growth of small, low-cost drones has placed new demands on Electronic Warfare, requiring defensive systems capable of detecting and responding to agile, low-signature threats. A recent comprehensive survey of anti-UAV research offers an in-depth view of how multi-modal sensing, machine learning and adaptive algorithms are reshaping this domain. As a continuation of our series on innovation in EW, this article examines these developments and their implications for future training and defense architectures.
Expanding the Anti-UAV Landscape
Earlier articles in this series analysed how the rapid evolution of drone warfare has reshaped Electronic Warfare, turning the battlefield into a domain of accelerated adaptation. The survey by Dong and colleagues shifts the focus from battlefield practice to technical architectures, offering a detailed account of progress in anti-UAV research and the constraints limiting current systems. Their work is anchored in the empirical foundations of datasets, benchmarks and machine-learning methods, showing how the defense community is attempting to match the pace of innovation on the drone side.
A Multimodal Data Foundation
The survey begins with an overview of UAV datasets that now span the full sensor spectrum: RGB imagery, infrared and thermal recordings, radar and LiDAR signatures, acoustic data and RF traces. A comparison conducted by the authors highlights the variability and complementarity of these modalities. Radar datasets such as mDrone capture micro-Doppler signatures; infrared datasets such as Anti-UAV410 address night-time and adverse-weather conditions; and multi-modal datasets such as MMAUD combine radar, LiDAR, audio and vision in synchronized sequences.
This breadth of data reflects a growing consensus that no single sensor can reliably detect small, low-RCS drones in real operational environments. Visual detection suffers at distance or in poor illumination; RF monitoring is susceptible to interference; acoustic signatures degrade sharply with wind or background noise; and radar returns of miniature drones can fall below clutter thresholds. Anti-UAV systems must therefore fuse data streams, both to improve detection sensitivity and to withstand deliberate adversarial tactics.
Machine Learning Across Modalities
Dong et al. map recent advances across the three classical objectives of counter-UAV research: classification, detection and tracking. The survey reveals a marked evolution from single-modality models toward hybrid and fusion-based architectures.
Classification approaches extend from RF-feature learning to acoustic spectrogram analysis, radar micro-Doppler signatures and vision-based CNNs, culminating in multi-sensor pipelines that combine radar, LiDAR and RGB inputs. Detection research has been dominated by YOLO variants, now augmented with attention mechanisms, deformable convolutions and transformer-based components for improved small-object performance. Tracking has become a field of its own, with Siamese architectures, spatio-temporal attention and hybrid detection–tracking systems designed to maintain lock in cluttered, occluded or evasive scenarios.
The performance gains demonstrated in laboratory settings remain vulnerable to domain shifts: changes in lighting, terrain, signal congestion or adversarial strategies. This limitation is one of the survey’s central themes.
Gaps Between Research and Operational Reality
Despite rapid progress, several challenges impede real-world deployment. Many datasets reflect controlled environments and lack adversarial complexity; others require precise sensor synchronisation that is difficult to replicate at scale. Few benchmarks represent swarm behavior, deliberate RF interference, complex occlusions or coordinated decoy actions. As a result, systems trained on isolated or curated datasets struggle to generalize in the field.
These observations align with a broader theme in the EW literature: the adversary adapts faster than fixed architectures. Without continuous learning and domain adaptation, even the most advanced detection pipeline risks obsolescence.
Emerging Directions: Towards Adaptive, Learning Systems
The most forward-looking contribution of the survey concerns emerging approaches aimed at bridging the gap between controlled training and operational unpredictability. Diffusion models are becoming central tools for synthetic data generation and domain adaptation, addressing the shortage of annotated datasets and allowing systems to train on a wide variety of simulated conditions. The paper introduces a taxonomy diagram depicts how these generative models integrate with self-supervised learning, vision-language frameworks and reinforced control algorithms.
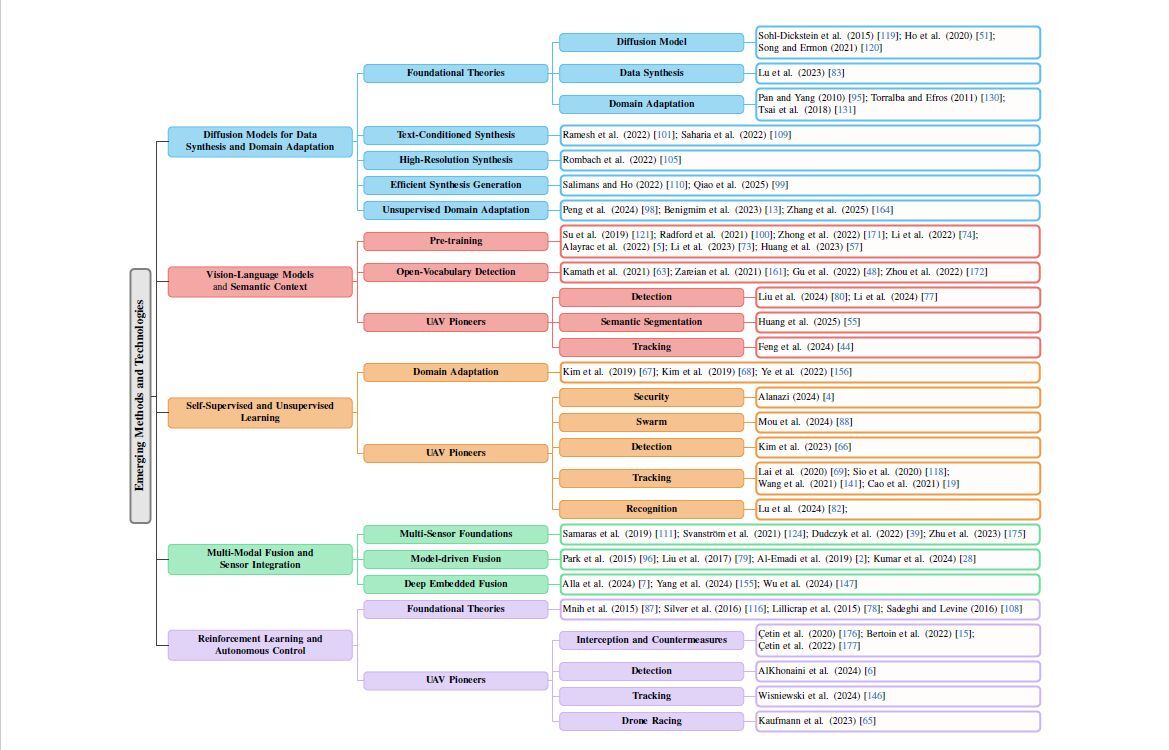
Dong et al (2025): Taxonomy for emerging methods and technologies in UAV research.
Vision-language models enable open-vocabulary detection, giving systems the ability to classify drone types or behaviors not explicitly present in their training sets. Self-supervised techniques reduce the dependence on costly human annotation and help maintain performance across shifting environments. Reinforcement learning, meanwhile, is emerging as a method for autonomous interception, response selection and multi-drone coordination.
Together, these trends suggest a future in which anti-UAV systems behave less as fixed detectors and more as adaptive agents embedded within larger C4ISR and EW ecosystems.
Implications for Electronic Warfare and Training
The survey reinforces the argument advanced earlier in this series: counter-UAV defense is becoming a systemic challenge that demands modularity, reconfigurability and continuous learning. In this respect, anti-UAV research mirrors the logic of platform-based innovation previously explored in relation to SkyRadar’s modular training ecosystems.
For training organisations, the implications are immediate. Operators must work with sensor fusion, understand the characteristics and limitations of each modality, and interpret the outputs of increasingly complex AI-driven systems. Radar remains foundational — particularly in the interpretation of micro-Doppler and small-target signatures — but it now forms part of a broader multi-modal skill set.
SkyRadar’s reconfigurable simulators, which already support radar, EW and multi-sensor training scenarios, are well aligned with these developments. And we further expand them to embrace the new constellations. As anti-UAV defense becomes more autonomous and data-driven, training environments must allow students to experiment with sensor combinations, evaluate algorithmic strengths and weaknesses, and understand how multi-modal systems behave under adversarial pressure.
A Convergence of Research and Operational Need
Dong et al. position the anti-UAV field at a turning point. The technical foundations — datasets, detection models, tracking algorithms and fusion architectures — are rapidly maturing. The remaining challenge is to integrate these components into resilient, adaptive defense platforms that can match the speed and scale of drone proliferation. As the research community moves in this direction, the importance of modular, platform-based EW operational and training ecosystems becomes even more evident. We are working on it, together with an ecosystem of European and international research institutions and defense companies.
Stay Tuned
Stay connected with our ongoing publications on Electronic Warfare and Radar Technology.

References
- Dong, Y., Wu, F., Zhang, S., Chen, G., Hu, Y., Yano, M., Sun, J., Huang, S., Liu, F., Dai, Q. and Cheng, Z-Q. 2025. Securing the Skies: A Comprehensive Survey on Anti-UAV Methods, Benchmarking, and Future Directions. arXiv preprint.






